Russian robots perform tasks in natural language. Winter ROS Meetup 2024 – how was it and how will it be?
Hi all! Today we will go back in time and remember how the winter ROS Meetup took place on February 3, 2024: what topics on LLM, Deep Learning and anthropomorphic robots were covered and what awaits us next?
One of the most pressing problems in robotics is robot control. Structurally, robots are already partially ready to perform routine work, help people in some production processes or provide services. However, there is not yet a single control system that would be successfully used (we do not take into account programmed manipulators for welding, their working program may not change for years) and would not require huge human resources to teach robots basic skills.
Today, control systems have received a powerful impetus in development thanks to the use of neural network approaches. And robots can already understand and perform tasks given in natural (human) language, without a lot of time spent on training them. Moreover, many of them, to some extent, retain the ability to adapt to new conditions.
It sounds exciting? Do they do this in Russia? Yes, and yes again! Below we will briefly discuss the presentations from this thematic block.
And in order to hear the most current information from this area and more, come to the next ROS Meetup April 27-28, 2024. Announcement with the program and link to register for the in-person event here. Don't miss the opportunity to get closer to the future together with the largest Robot Operating System community in Russia 🙂
Next, we post videos from the last meetup with a detailed description.
Multi-component control systems with language models in ROS

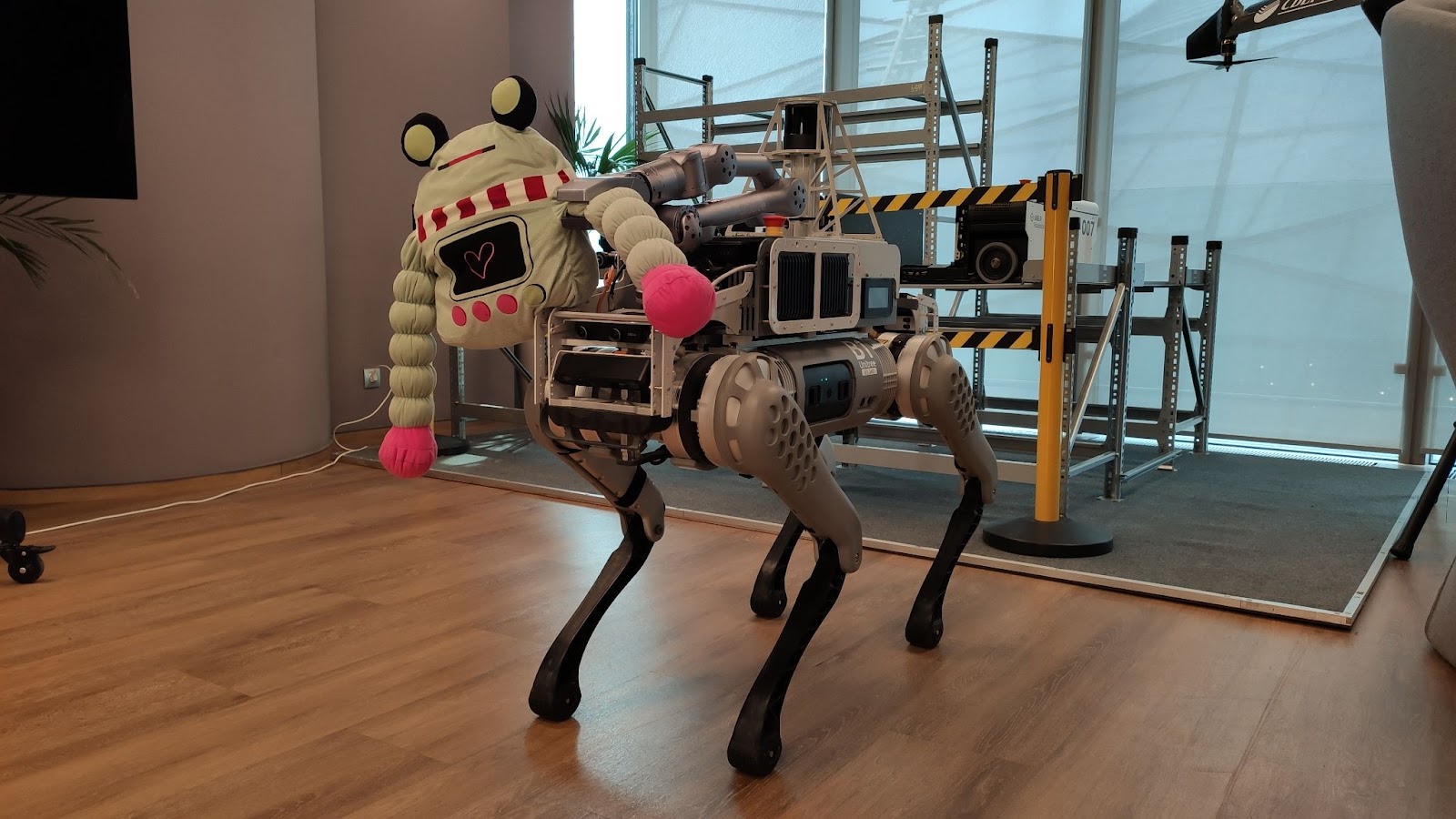
So, the thematic block was opened by a team of scientists from MIPT and AIRI. In their presentation, the speakers shared their experience of building complex control systems with language models at the strategic level with a large number of interacting subsystems for controlling a mobile manipulator. The key feature of the report is the impressive results of the team – you could see with your own eyes an example of how a robot receives a task in natural Russian and completes it!
Speaker: Yudin Dmitry Alexandrovich
Behavior tree as a way to specify a robot action scenario in ROS2

Another report from MIPT on the principles of constructing and implementing behavior trees for various scenarios of performing actions of a mobile robot with a manipulator in ROS2. Behavior trees are used for robotic decision making. Which “branch” is the most current? Hear in the report!
Speaker: Link Sergey Alexandrovich
Features of implementing a navigation stack on a mobile robot

Even smart robots have to solve navigation problems – where and how to get to solve the task? Scientists from MIPT share their experience in implementing Action servers for actions in the environment, SLAM, trajectory planning, MPC in the navigation stack for a mobile robot. See with your own eyes how the robot is already moving to solve problems!
Speakers: Muravyov Kirill Fedrovich, Muhammad Alhaddad
Numerical design and generative design of robotic systems
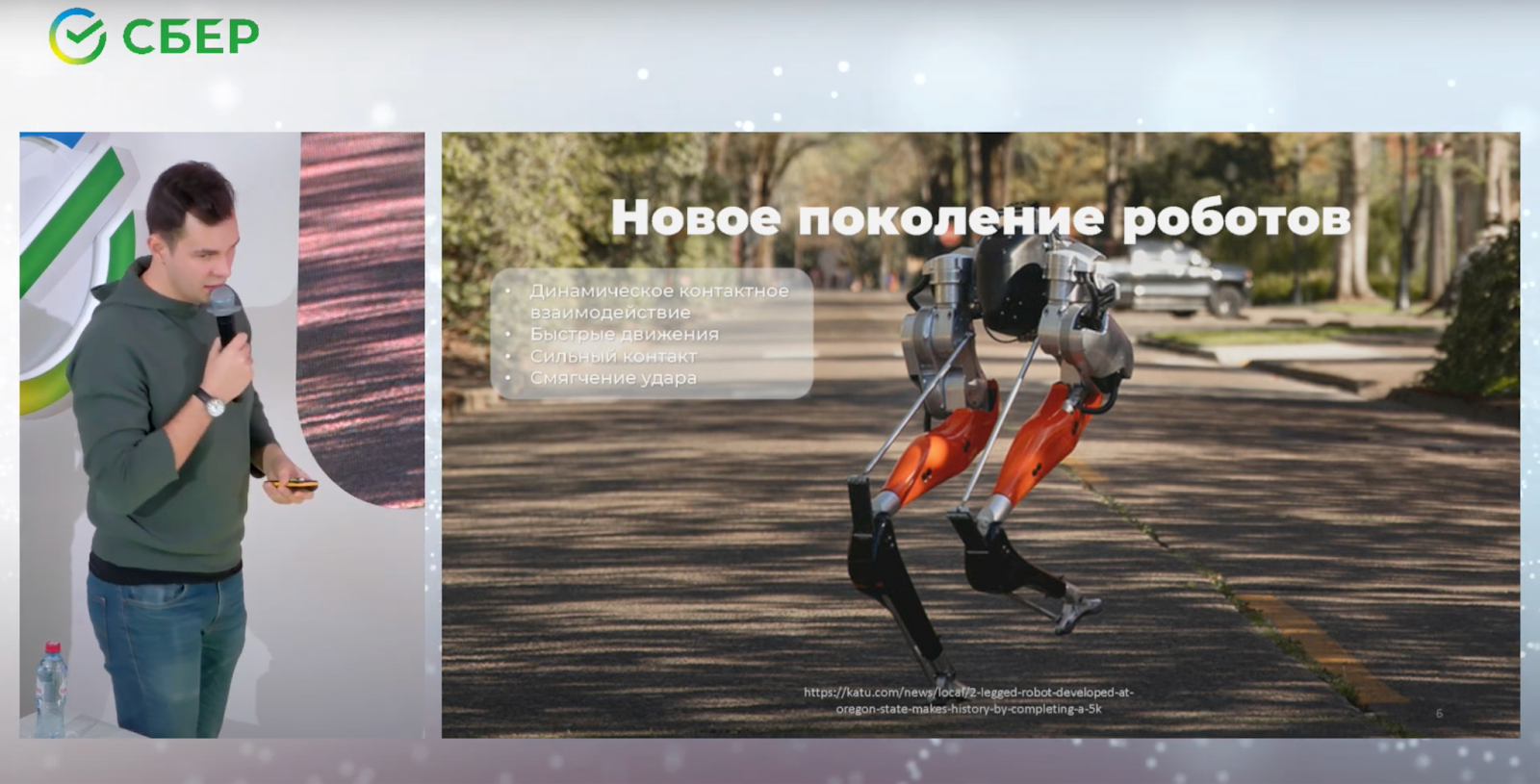
Despite the fact that robots are structurally ready to perform some tasks, engineering does not stand still. The old design paradigm, in which reliable but not flexible robots are developed, is being replaced by a new one, which answers the question: how to properly synthesize mechanisms in order to provide robots with the ability to adapt and interact in a real structured dynamic world not only at the level of algorithms, but also at the level of mechanisms? All this is considered using a number of examples: anthropomorphic grippers, manipulators, pedipulators, exosuits. In addition, existing design methods ranging from manual methods to generative design are compared.
Speaker: Ivan Borisov
This is just a part of the Russian developments that you can hear about at ROS Meetup. At the next meetup on April 27-28, you will be able to learn about new achievements in this area, as well as participate in the discussion and meet the speakers.
How to register for the ROS Meetup on April 27-28?
To register as a listener in the conference room or online, you need to fill out form. For the registration form to work correctly, you must have the browser installed certificate of the Ministry of Digital Development.
The meetup is organized by the ROS community with the support of the Sber Robotics Center.
All questions about the event can be asked at telegram chat.
Come, it will be interesting!