Space technology in unmanned vehicles: Kalman filter (from NASA Archives)
On the 51st anniversary of the first human moon landing in July 1969, let’s recall the fundamental technology that helped make this landing possible: Kalman filter. Named after Rudolf Kalman, an American electrical engineer, mathematician, and inventor of Hungarian origin, the filter is a mathematical technique that he proposed in 1960. It is especially useful in assessing the position of objects based on observations using several sensors and is widely used in guidance systems, navigation and control of vehicles and aircraft.
It was during Kalman’s visit to the NASA Ames Research Center in Mountain View that NASA engineers saw that Kalman’s methods could solve the non-linear trajectory estimation problem for the Apollo program. However, running the Kalman filter algorithm on a 1960s computer was not possible. A technical memorandum (from NASA archives, see below) illustrates research work in the 1960s and 1970s, during which a “numerically accurate Kalman filter in a computing system with a limited memory capacity, suitable for real-time use, was introduced, for example , for onboard navigation of airplanes or spacecraft. “
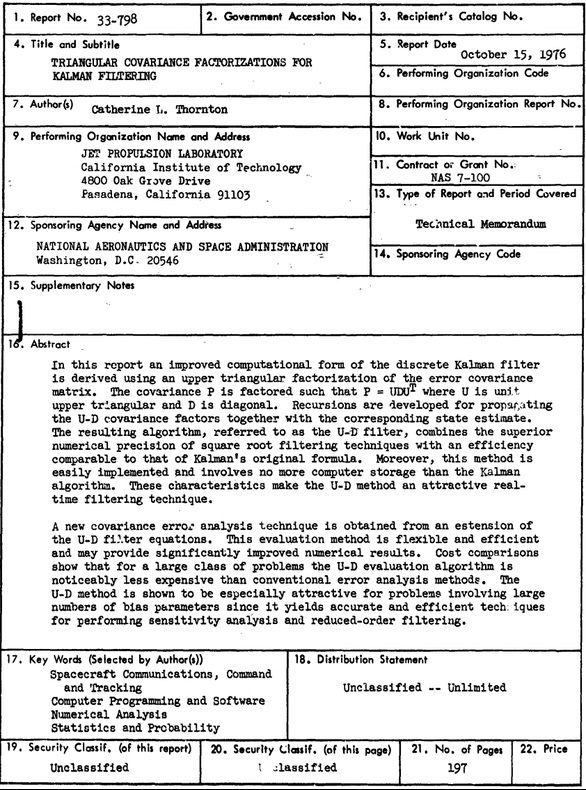
Tripartite covariance coefficients for Kalman filter (NASA archives)
Another serious problem with the Kalman filter 50 years ago was the lack of computational stability due to rounding errors caused by the 8-bit limit. To solve this problem, many complex solutions have been developed.
The efforts of the engineering team continued, and in the end, the perseverance paid off:
The Apollo computer used 2 kb of magnetic RAM and a processor built from integrated circuits. Initially, NASA did not plan to use the Apollo computer for control. NASA’s goal was to use radio signals from the ground to control the spacecraft. Plans changed when engineers at the Massachusetts Institute of Technology were able to integrate the Kalman filter into such a tiny computer. It was really wonderful.
– Jack Crenshaw, Apollo engineer.
To a large extent, such engineering feats made the lunar mission a success. Fifty years later, the Kalman filtering algorithm is used here on Earth in many areas, including robotics, unmanned aerial vehicles and VR games. Researchers at the University of Tokyo in 2014 used a Kalman filter to ensure Roomba can successfully detect people and avoid them. The US Federal Reserve used the Kalman filter to determine long-term neutral interest rates and manage monetary policy.
Sebastian Tran, creator of Google’s unmanned vehicle, teaches how to use the Kalman filter to track real-time objects to create unmanned vehicles. This Month Autoware announced the release of the kit open source algorithms, which includes a Kalman filter, and this set is aimed at developing a reference implementation of an unmanned vehicle in the real world.
Over the decades of its existence, a number of technologies have jointly evolved and reached such a degree of development that their combination makes unmanned driving possible, useful and valuable to society. However, in order to move from prototypes to commercial implementation, companies will strive to standardize and ensure interoperability between components — hardware and algorithms. The interaction of the components contributes to competition, and competition helps to improve quality and lower costs, brings the unmanned future closer and justifies the billions of dollars spent on research and development in the field of unmanned vehicles.
References
- Kalman article 1960: A new approach to linear filtering and forecasting
- The Kalman filter that helps Roomba avoid people: IEEE publication
- Jack Crenshaw Interview (2009)
- US Federal Reserve: Estimation of long-term neutral interest rate (2018)
Subscribe to the channels:
@TeslaHackers – a community of Russian Tesla hackers, rental and drift training on Tesla
@AutomotiveRu – auto industry news, iron and driving psychology

We are perhaps the most powerful competence center in Russia for the development of automotive electronics in Russia. Now we are actively growing and we have opened many vacancies (about 30, including in the regions), such as a software engineer, design engineer, lead development engineer (DSP programmer), etc.
We have many interesting challenges from automakers and concerns driving the industry. If you want to grow as a specialist and learn from the best, we will be glad to see you in our team. We are also ready to share expertise, the most important thing that happens in automotive. Ask us any questions, we will answer, we will discuss.
Read more useful articles:
- Free Online Courses in Automotive, Aerospace, Robotics, and Engineering (50+)
- [Прогноз] Transport of the future (short-term, medium-term, long-term horizons)
- The best materials for hacking cars with DEF CON 2019-2020
- [Прогноз] Motornet – a data exchange network for robotic vehicles
- Companies Spend $ 16 Billion On Unmanned Vehicles To Capture 8 Trillion Market
- Cameras or lasers
- Autonomous cars on open source
- McKinsey: Rethinking Software and Electronics Architecture in Automotive
- Another OS war is already under the hood of cars
- Program code in the car
- In a modern car, there are more lines of code than …