The power of the crowd. As in San Francisco, developed a musocoque robot – river cleaner

If you walk along the banks of the Chicago River this summer, you will see something rather unusual. Among ducks, swans, fish, rare beavers and otters from time to time a small robot will swim. Similar to a small raft, it will be lazy to walk up and down the river, collecting everything that will be on its surface. This is Treshbot – the brainchild of the Chicago-based startup Urban Rivers, which brought together environmentalists, robotics and other professionals to clean up urban rivers from debris and help their inhabitants.
In appearance, the Tashbot may seem like a “water rumba”, autonomously (or accidentally) choosing the path while there is still pollution ahead. He moves by himself, just like a rumba! But actually the opposite is true. The robot does not choose the direction itself; at any moment it can be controlled by one of about 4,383,810,342 people – global Internet users.
Each person with Internet access can log in to the Urban Rivers website and become a bot pilot for two minutes. The company's goal is for the person to find the garbage at that time and manage to grab it, and ideally also take it to a special container by the river, from where it will be removed. So, the purification of rivers becomes not a virtual activity that “someone else is engaged in”, but a very real activity in which you can physically participate – without contaminating your hands.

Nick Wesley, one of the project managers, says:
We are finally at a stage where most people live in places with a decent Internet connection. The technology required to build our robot is as simple as technology in an inexpensive drone. You can stream a video with a rather small delay, and at such speeds it can be controlled. The benefit to nature, interesting for a couple of minutes, gives the feeling that today you have done something useful, what else is needed.
Treshbota Construction
The idea of developing controlled waste bins for the purification of urban rivers appeared two years ago. In June 2017, Urban Rivers successfully created "floating gardens" on the same Chicago river to help animals return to their natural habitat. Unfortunately, the team realized that these gardens were quickly littered with debris. To solve the problem, they began to invite volunteers, who in the old manner went to the river in the mornings and manually collected more or less large litter. Efficiency was very low, mainly because of the irregular flow of the river.

Sometimes people would go to shore in the morning, and there was no garbage to collect. Then something changed in the flow, and soon this place was filled with garbage. We realized that we need a solution that will be included constantly. So that trash can be cleaned in real time as it drifts.
The rudiments of ideas appeared, but the team did not know how to make the robot find and collect pollution. Computer vision and image recognition technologies have progressed well in recent years, but it still wasn't easy to teach a bot to determine what fits the concept of "junk". “Garbage” is a rather abstract concept. It turned out that it is good to separate it from natural objects in the river so far only people can. Thus, the idea of creating a remotely controlled "rumba" was formed, which could be piloted by users from all over the world.

The launch of the first Tashbota is scheduled for the end of this month, and it will work steadily in June. Then you can personally try to fly it. In the meantime, the most impatient users can practice in an online demo in a test pool (or, as it is called here pompously, “underground aqua-laboratory”), filled with plastic ducks, which need to be collected. Each is given five minutes. And this, by the way, is really quite fun.
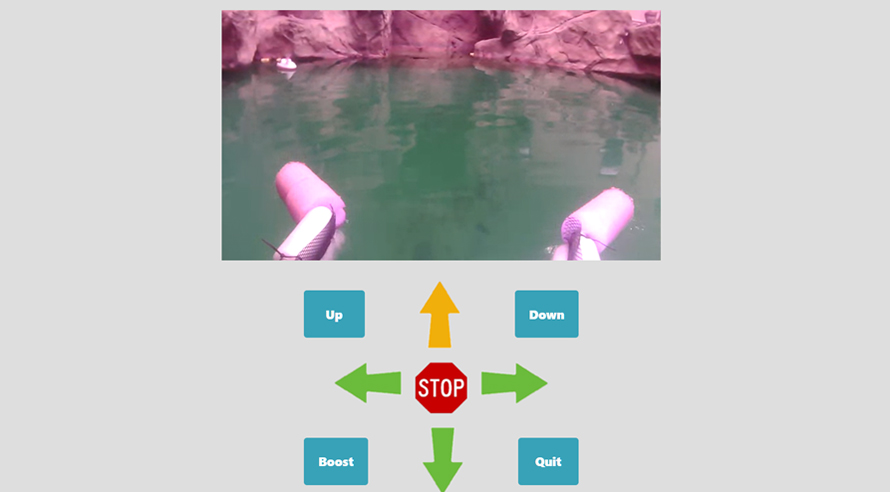
Even from Russia, the robot responds fairly quickly, it is easy to control, although unassembled ducks were not detected (due to the habraeffect, one may have to wait for their turn to the robot a little longer).
Crowd power
The idea of asking for help from the public to solve big problems is not at all new. In 1715, mathematician and astronomer Edmund Halley (after whom Comet Halley was named) published a map predicting the time and path of future solar eclipses. Since Halley could only be in one physical place during an eclipse, he issued a “request to the curious” and asked them to capture their location and how the sky looked during the eclipse, asking to especially note the “duration of total darkness”. This first crowdsourcing was successful, and, after gathering information from the public, Halley created a second, even more accurate map that helped predict the eclipse in 1724.

Eclipse Map of Halley
Today, technology makes it possible to add real interactivity to Halley’s methods. People can be involved not only in the process of collecting and transmitting information. People can do more interesting and varied work, thus getting something from the process in return. In 1991, almost 300 years after the initiative of Halley, Loren Carpenter, co-founder of Pixar, gave a memorable demo broadcast at a computer graphics conference. He first showed participants the strength of the crowd, and demonstrated that each member of the audience could be used as a separate node to solve the problem.
The “problem” was to force the 5,000 conference participants to play one giant ping-pong game. Everyone present was given a racket, with one green and one red side. In the center of the room was placed a large, as in a cinema, screen, which showed a classic video game, and a computer that scanned the audience, and found out which side of the racket they were holding up – red or green. Each racket held by a member of the audience was counted as one vote (one step up or one step down), and the virtual beating of the ball on the screen proceeded according to the law of such a democracy. An upgraded version of this experiment in 2013 also conducted the BBC. The movement of the ball (or, in this case, the shark) is rather slow, and it is not very interesting to observe, but to be in the audience, and to try to work as a single unit to achieve a common task is quite.
Laurent Carpenter's experiment on SIGGRAPH-91
The Internet takes such work with the crowd, and takes it to a new level. Now you can connect to the task not a couple of hundred people, like Halley, and not 5,000 people, like Carpenter, but any number, even millions. Such massive collaboration led to the emergence of Wikipedia, Linux, even the giant PageRank hyperlinking, which led to the emergence of Google. Purification of the rivers with the help of the power of the crowd should also become something quite achievable. And this is not the only task that can be solved in this way.
Zooniverse Rescue
Chris Lintott is a professor of astrophysics at the University of Oxford. Twelve years ago, he worked on a project for which he needed to analyze the shape of galaxies. But even if we take a small part of the cosmos, there are too many galaxies there – many millions. It turned out that, as is the case with the definition of garbage on the Chicago River, the human eye with the classification of the type of the galaxy so far copes better machines. After classifying 50,000 galaxies, Lintott and the team decided that they needed help.
We created a website, Galaxy Zoo, and asked the public – ordinary users – to help us with determining the type of galaxies. You did not need to know what a galaxy is, or have an interest in astronomy. You just saw what was in front of you in the image, and chose what it looks like more. People showed great interest in the site, we received hundreds of millions of classifications.
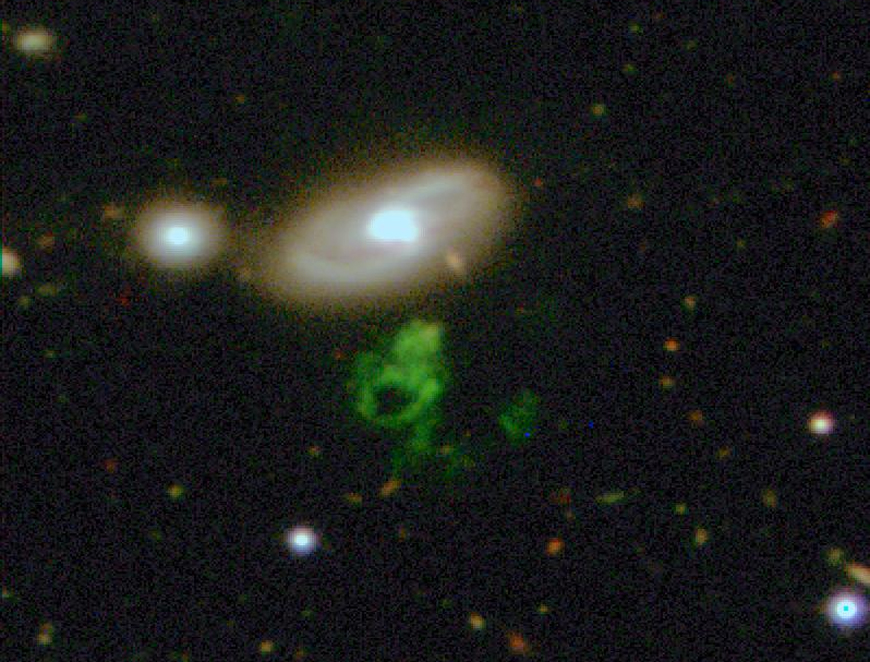
As a result, everyone got a chance to become part of advanced space discoveries. One teacher from Denmark, Hanni van Arkel, even discovered an incomprehensible object – she gave out something on the site that looked like a green figure, she consulted on the forum, is this not a mistake, enthusiasts checked this part of the cosmos, and there really seemed something strange . Now this object (most likely, a gas cluster, illuminated by a quasar) in honor of the teacher is called the “Hanni Object”.
Well, for Chris Lintott, the main thing was that the project turned out to be incredibly successful:
We were contacted by other researchers who simply could not cope with the volumes of their data. From astronomy to biomedicine and sociology, everyone needed to process them somehow.
So Lynthott created something like Kickstarter for research — the Zooniverse platform, where scientists can crowd out projects by asking for help from the public. It employs about a hundred projects, just too large for a limited number of scientists.
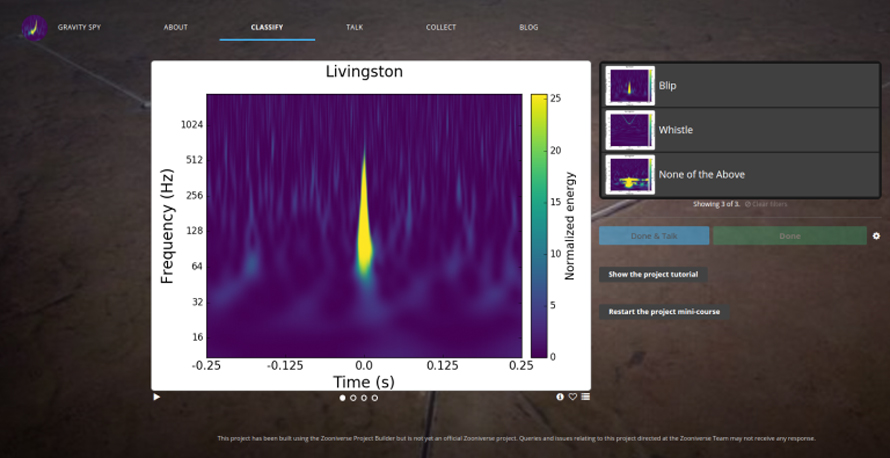
Gravity spy
One such project, Gravity Spy, helps astrophysicists determine gravitational waves and separate them from errors in data collected by laser interferometers. Regular users currently have more than 1.2 million classifications. Another project, Wild Gabon, assesses the mammalian population in the African savannah. And Planet Hunters invites people to discover new planets using data from NASA satellites. So far, about a hundred of them are so open (out of 300 thousand verified shots).
Chris Lintott, founder of Zooniverse, says:
I even find it difficult to imagine that 20 years ago no one discovered a single planet around other stars. Now it can be done simply with your web browser.
When Hurricane Irma walked across the Caribbean islands in 2017, the Planetary Response Network organization used the Zooniverse to create the most accurate maps of the area. Nearly six thousand volunteers have gone through 300 thousand images to determine which roads are flooded, which are blocked, and which ones you can move around. There were also groups of refugees in need of immediate assistance. It turned out to be a great and indispensable tool for humanitarian workers arriving in the region.
Triumph of the communities?
Crowdsors is not a panacea, of course. It will not always be the answer to global problems. The solution cannot always be decentralized and turned into a game for the public, like picking up trash with a robot or discovering new planets. In Yevgeny Morozov’s book “To save everything, click here”, the growing people's belief is criticized that any situation can be resolved in a single fix.

But, as confirmed by Thrashbot and dozens of projects on the Zooniverse, even the biggest problems can at least be greatly simplified. Especially if they follow the same formula: a large, centralized task that can be divided into small, small pieces. In general, it is ideal if each of these pieces represents some kind of small completed work that can be experienced. Like the raising of a plastic bag from a river, adding a separate edit to Wikipedia or checking an image for the presence of a planet or galaxy in it.
Lintott explains:
Their actions must be real and meaningful. You can't just let people fill out forms. They should feel part of an important process. If you can achieve this, you will see that many people are willing to make very great efforts.
The emergence and development of new technologies, such as VR and drones, opens up new perspectives, so this rather unusual section of crowdsourcing may become even more interesting in the near future. Regular users can help not only in filling out maps, piloting robots, or finding the necessary objects in the images. For example, on the Internet it is theoretically possible to feel (and, accordingly, classify) sounds, tastes, smells and textures.

General crowdsourcing projects such as Zooniverse and Tashbot involve ordinary users in important processes – even if they occur thousands of kilometers from them. And this is definitely better than the trend for “cliktivism” (as activism, but only in the form of clicks) – when people consider that they have done a very useful thing, simply because they like the right page or post on Facebook. Like Klektivizm, initiatives like Gravity Spy or Planet Hunters allow you to participate in the process, staying in a dressing gown and not leaving the comfort of your own chair. But there is a real and instant benefit, plus you still make a little effort.
Nick Wesley, one of the creators of Urban Rivers Thrashboat, explains:
I think these new technologies of telepresence and involvement are an extremely useful tool that allows people to gain experience in something that may not be in their place of residence. When you find something or explore something on your own, you become interested in it much more. I think this is really cool. There are many different areas that can use this approach to solve really big global problems. Especially if you manage to gamify this process and make it really interactive.