It is very difficult to find a black cat in a dark room, especially if she is not there.

My daughter is engaged in making jewelry from polymer clay and somehow came to me with a request. I want, he says, to shoot commercials of my products on video and publish them on Instagram.
After clarifying all her wishes and several experiments, approximate requirements for the project “video filming for the Internet” were formed:
- Shooting video must be done using a tripod (otherwise, the operator’s movements are noticeable in the video)
- A turntable is required to expose small objects (since the camera is on a tripod, and it is necessary to show the products from all sides).
- Filming must be carried out with a mobile phone camera, because one of the places to post is Instagram, where you can only publish a video from a mobile phone
Actually, after that, a curious story begins about how I made a rotating object table for filming videos, and what happens when you are very keen on finding a solution without understanding the essence of the problem.
Attention, further pictures and videos!
First approach
I have had an old Cyclops, a 3D scanner, which already has a round turntable of a suitable size, has been gathering dust on my shelf for a long time.

The original design of the scanner was designed for manual assembly, so in a couple of evenings it turned into such a compact rotating stage.

My version of the scanner uses a custom board similar to the Arduino Nano board, but it additionally has a stepper motor driver and keys for controlling lasers.
I looked at the driver documentation, called the necessary pins on the microcontroller and put in a few lines of code in which I hardcoded the rotation of the stepper motor at one constant speed at the microstep.
#include <Arduino.h>
#define DIR 13
#define STEP 12
#define ENABLE 9
void setup() {
pinMode(DIR, OUTPUT);
pinMode(STEP, OUTPUT);
pinMode(ENABLE, OUTPUT);
digitalWrite(ENABLE, LOW);
digitalWrite(DIR, LOW);
}
void loop() {
digitalWrite(STEP, LOW);
delayMicroseconds(1);
digitalWrite(STEP, HIGH);
delayMicroseconds(3000);
}
Something interesting began after the filming of the first videos. The video shows the uneven rotation of the subject table, which creates unpleasant “jerking” effects.
It is clear that such a video is more annoying than attractive, so I had to sit down to select the engine rotation parameters and an unpleasant fact was revealed empirically.
At a very slow speed of rotation, below a certain threshold, discrete switching of steps becomes noticeable. And due to the rigid connection of the shaft with the object table, the jerking of the table becomes noticeable, which occurs when switching the stepper motor windings with a low frequency.
But, if you make the rotation speed slightly above the threshold, then the visual jerking disappears, but the rotation of the table itself becomes quite fast and it becomes uncomfortable to examine objects with such a rotation speed. As a result, the first option “head-on” had to be rejected and thought about improvements.
Second approach
After a little thought, I decided that the easiest way out in my situation would be a reduction gear between the motor shaft and the object table. Let the stepper motor rotate quickly, but smoothly, and due to the reduction gear, the stage will rotate at a speed acceptable for video filming.
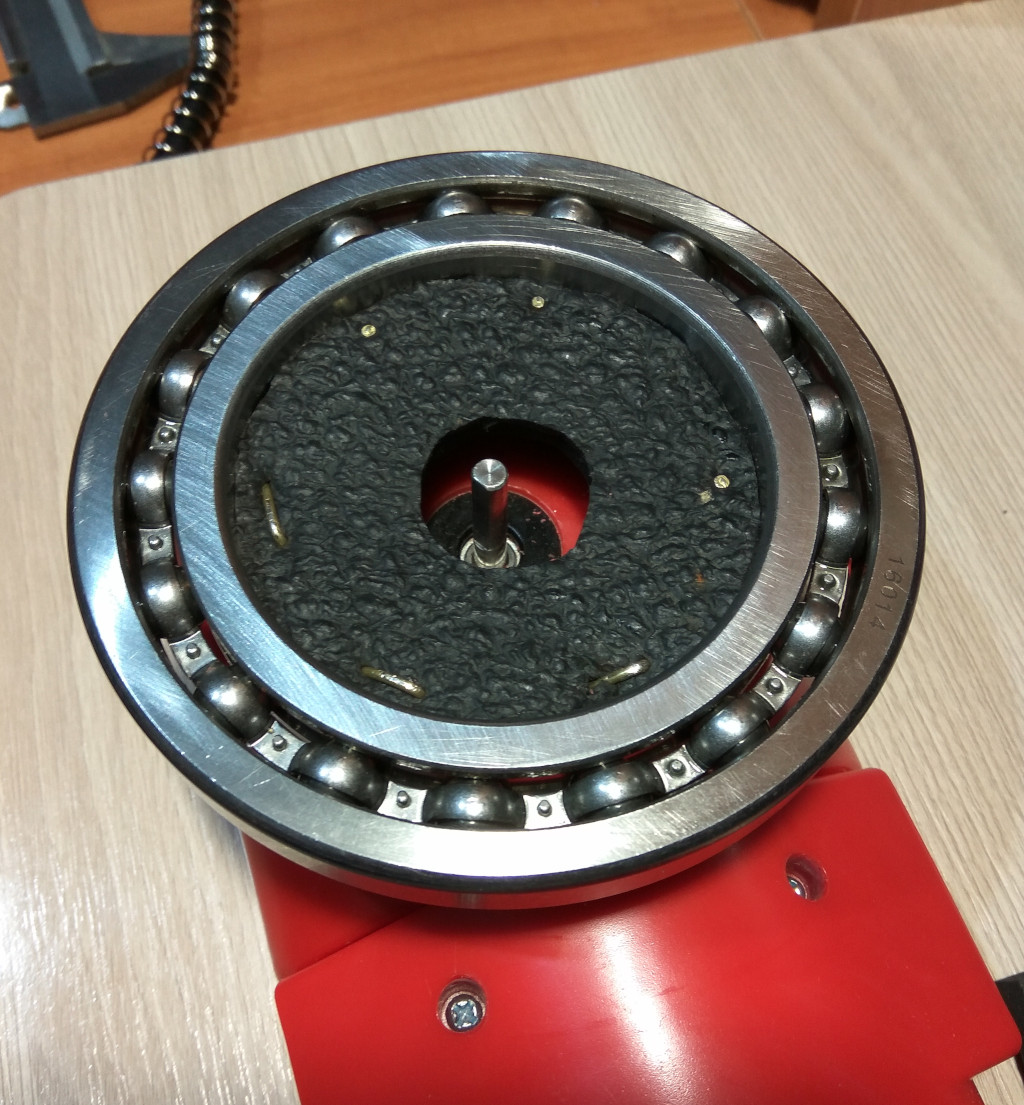
I didn’t want to order a gearbox in China, so that later I would have to wait a few weeks for delivery, but I wanted to do it faster. But there were also no ready-made miniature gearboxes with my city. Therefore, having studied possible solutions on the Internet, I settled on a hand-made reduction gear from a rotation bearing. Like this
A slight difficulty arose when it was necessary to place an end stop directly on the bearing balls. But then plastic came to the rescue, which is molded in hot water directly by hand, and then slightly modified with a file.



True, in the end, there was not much sense from such a decision either.
Although the gearbox fulfilled its role, and the table began to rotate more smoothly, due to the operation of the engine above the “jerking” speed, such a gearbox kept the load very scanty. A very small force was enough, and the table would stop or, even worse, begin to twitch due to the periodic loss of adhesion in the ball bearing.
As a result, the option with a homemade gearbox had to be abandoned.
Here I already got excited, and I wanted to make a revolving table by all means. And if you do not consider replacing a stepper motor or buying a gearbox, then the choice remained not great, or try to modify the software with a schematic diagram of the drive, in the hope that it will be possible to make the step of the stepper motor smoother at low speeds (for example, by switching several windings at the same time or using PWM), or install some kind of damper to smooth out the resulting oscillations.
Third approach
Installing a damper, which reduces the jerking effect due to its mass, seemed to me an easier solution than modifying the PCB, and I decided to implement it first. And then I remembered that the original design of the scanner had a massive ball bearing at the base of the table. It most likely serves exactly the same purpose – to reduce mechanical vibrations during rotation during scanner operation.

Calling himself an idiot, tk. removed the heavy ball bearing from the structure while experimenting with the reduction gear, I put it back in place. The rotation of the table has indeed become smoother.
Deciding not to be satisfied with what has already been achieved, I slightly modified the design, replacing the rigid mechanical connection of the engine shaft with the table with a piece of elastic rubber, which should slightly dampen small vibrations.
And from the same rubber I made a fastening of the ball bearing to the base of the table – I cut out a circle with a slightly larger inner diameter so that it would stand up by surprise, and then nailed attached the rubber to the plastic base.
On the one hand, such a design allows a slight backlash and does not allow the stage to twitch noticeably, and the large mass of the ball bearing dampens small vibrations.
epic fail
After the design was tried and tested, I proudly handed the stage to my daughter for testing, having previously told how to use this unit (insert the plug into the outlet and everything will work by itself).
What was my surprise when, instead of smooth rotation, convulsive twitching remained visible on the captured video.

And only now it became clear to me that it was not the operation of the stepper motor (although it lacked the smoothness of rotation), but the main part of the problems with jerking in the video was created by an old mobile phone, which, due to the low performance of the processor, or during recording , or when converting the video before publishing, it automatically converted the recorded video into such a format that later, when it was played back, even the initially smooth rotation became jerky.
As a result, the problem of smooth rotation on video clips was solved by replacing the old mobile phone with a new one, which was shooting video clips with a higher quality (although “jerking” effects sometimes appear on the new phone).